
Motivation and Biography

Photo credit: Josh Meister
About Me
I am a robotics research scientist. My passion is to take on the most interesting and challenging problems in robotics, and best of all, to tell the world all about it. In school, I trained as an engineer with a specialty in building and coding robots. For years, I've focused on making robots walk and run on two legs... like people! Now, as an academic scientist, it's my duty and joy to further advance this research and publish it for all to see. One of the great rewards of academic life is sharing not only what you did, but how and why you did it. It's this inventive and collaborative worldview that drove me to become a scientist.
Professional Biography
Christian Hubicki is an Associate Professor of Mechanical Engineering at the FAMU-FSU College of Engineering. His group’s research at the Optimal Robotics Laboratory specializes in legged robotics, applied optimal control, biomechanical modeling, and fast algorithms for adaptive robot behaviors. He earned both his bachelor's and master’s degrees in mechanical engineering from Bucknell University, earned his dual-degree PhD in Robotics and Mechanical Engineering at Oregon State University, and completed his postdoctoral work in the Mechanical Engineering and Physics departments at the Georgia Institute of Technology. His research awards include a Best Technical Paper Finalist at ICRA 2016, Best Paper Winner in 2019 from IEEE Robotics and Automation Magazine, Outstanding Locomotion Paper Winner at ICRA 2022, and a Young Faculty Researcher Grant from the Toyota Research Institute in 2021. His work has been featured at the National Academy of Engineering’s Gilbreth Lecture Series, the TEDx lecture series, and in media outlets from the Science Channel to CBS’s “The Late Show with Stephen Colbert.
Frequently Asked Questions
Why dedicate Your career to robots?
Robots are cool! Who hasn't marveled at a machine that seems to come alive? Robots can also make us safer and more productive. If we make great robots, then jobs that are dull or dangerous don't need to be done by people. Robotics can separate labor from life, freeing people to pursue their passions. It's a shift that would transform humanity. Most of all, I am fascinated by the grander question: "How do we get robots to work?" It forces us to think about how and why we do what we do as people. If we can't make a robot that walks, then we don't really understand walking. If we can't make a robot that cooks, then we don't really understand cooking. In my mind, researching robots that make our lives better is a quest to better understand life.

A small child with Legos.
How did you get involved in robotics?
I fell in love with robotics at a very young age. When I was seven, I got a motorized Lego kit for Christmas, which I used to make and program little wheeled robots. My parents recognized this interest in me, and made sure they immersed me in as much math and science as I wanted. They sent me to summer science and math camps and kept trying to find ways to feed my interest. In high school, I loved coding video games on my calculator and got obsessively involved with the school's FIRST robotics team.
I was fortunate enough to be accepted to the Bucknell University mechanical engineering program for college, where I tried to be involved with everything! I made every little task into a crazy project, like coding the video game club's tournament match-up scheduler. One of these projects was a puzzle-solving algorithm for an introductory programming class. Fortunately for me, this caught the attention of the professor, who then offered me my first robotics research position. Working in his lab, I realized that my drive to be creative and challenged was a perfect fit for academic research, and made it absolutely clear that I wanted to work as a robotics research scientist.
Bipedal robots can step over obstacles while standing tall and taking little floor space.
Why Build ROBOTs with Two Legs?
Two-legged (or bipedal) robots theoretically can go anywhere a person could, but maybe is too dangerous for a person to go. A robot with legs could charge into a burning building, run up the stairs, break down a door, and carry the people inside to safety. Having just two legs also allows you to stand tall while taking up little floor space, which we call a small form factor. Further, teaching robots to walk and run actually teaches us a lot about how humans move. This means we can use the science and engineering of legged robotics to help disabled people to walk again by building prosthetic legs and exoskeletons. Finally, bipedal robotics is a really interesting problem for me to work on. How can people do something so complicated for robots and make it look easy? I want to find out!
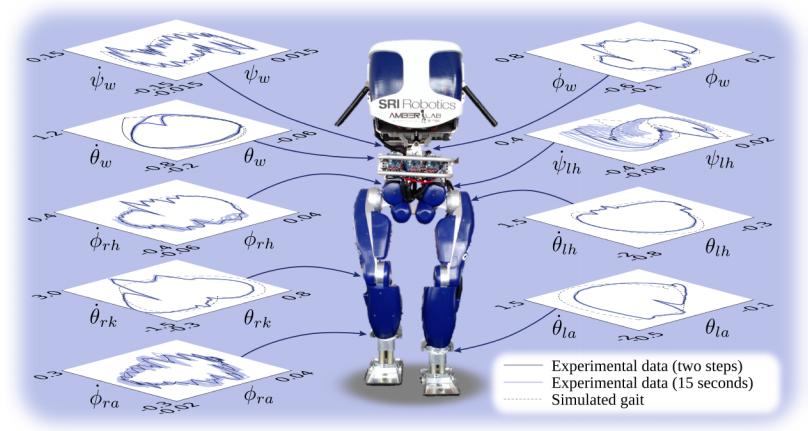
Controlled motions for a walking robot, which were computed using equations that are hundreds of miles long.
Why is it hard for robots to walk and run?
It's hard for so many reasons, from building to controlling them. It's hard to make robot components that are small enough to fit in a bipedal robot while also being powerful enough to walk and run. You also have to build them sturdy enough to take a fall and not break. Controlling two-legged robots is also an extremely difficult math problem. The equations that describe the robot's motion have properties that make them hard to solve, such as nonlinearity, underactuation, and hybrid dynamics. If you love math, there are plenty of challenging problems to tackle in bipedal robotics. These difficulties make walking and running a big and fun robotics challenge.